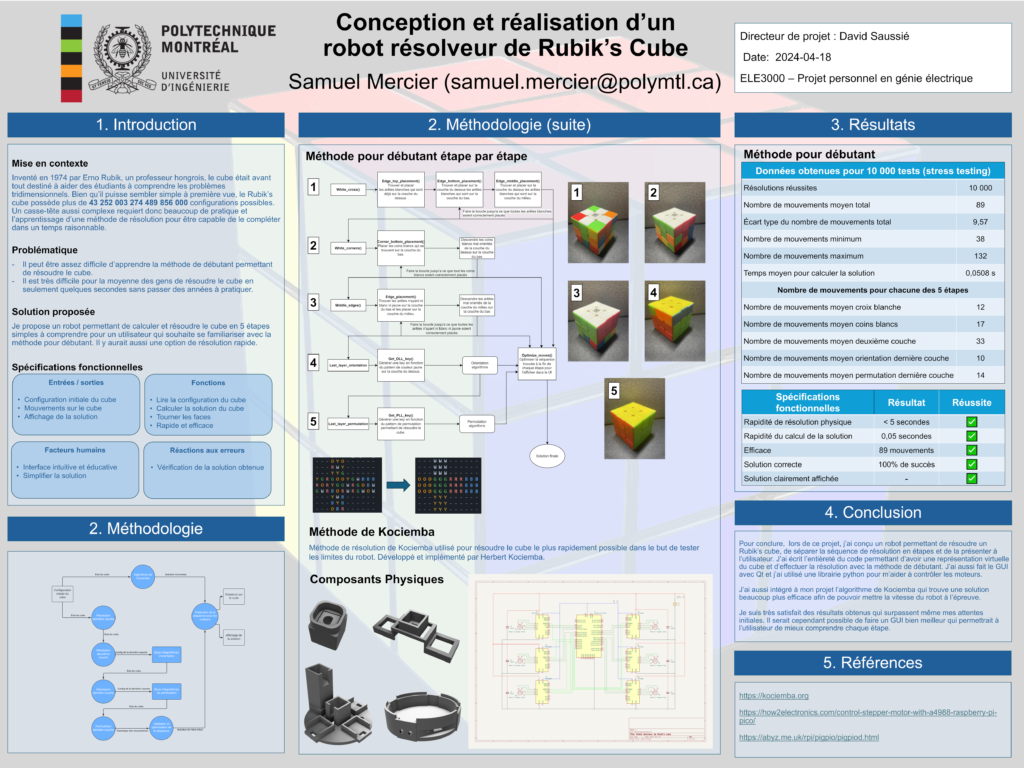
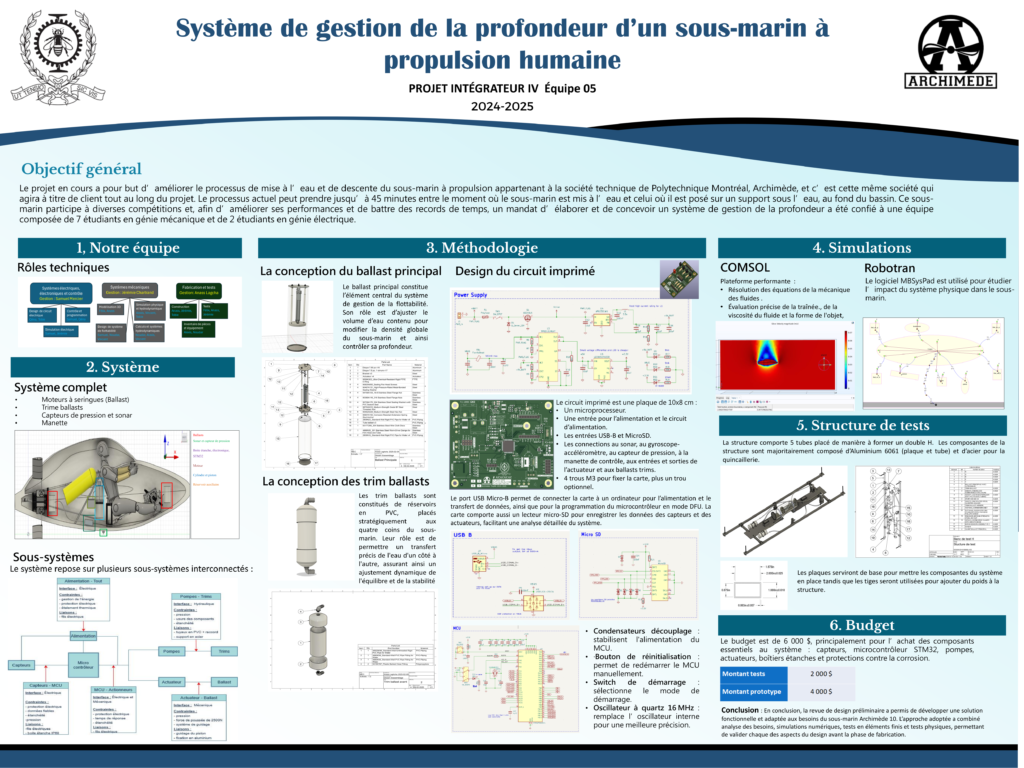
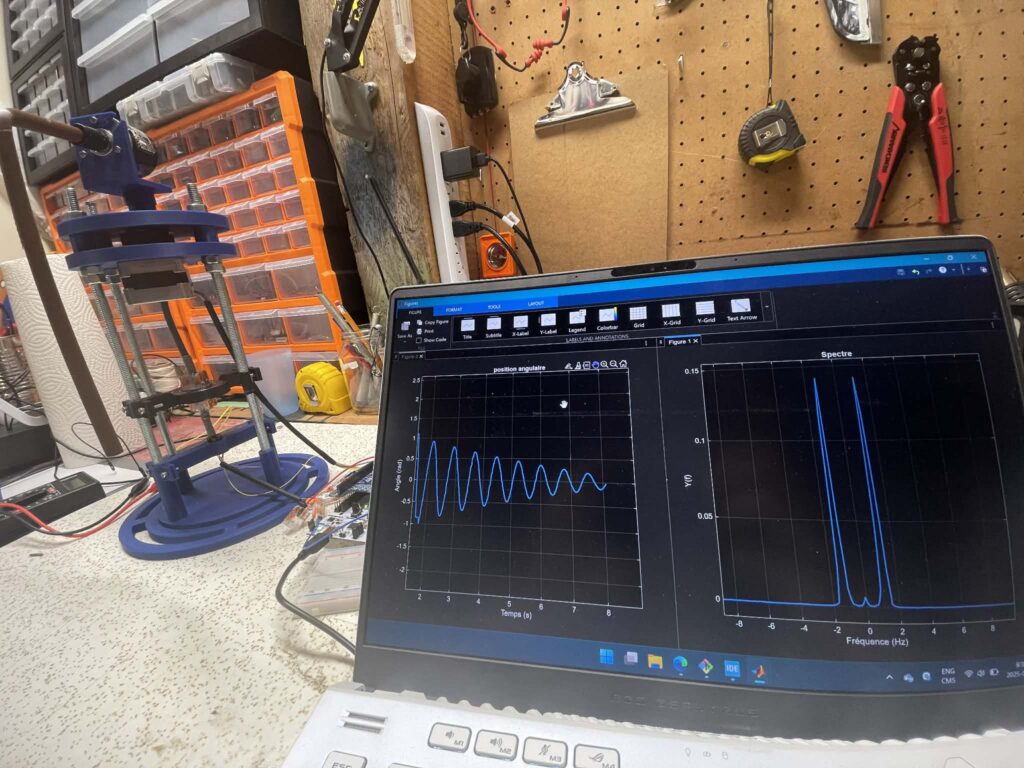
Portfolio Robot Résolveur de Rubik's Cube (Projet intégrateur 3) Développement d’un logiciel de résolution de Rubik’s Cube en Python sur Raspberry Pi pour algorithmes de résolution et contrôle des moteurs.Interface graphique QT. Conception mécanique de la structure du robot à l’aide de Fusion. Lauréat du premier prix à l’exposition finale du projet. Présentation du projet Système de contrôle de profondeur (Projet intégrateur 4) Développement du firmware embarqué en C sur STM32.Intégration de FreeRTOS pour la gestion des tâches, interruptions et communications inter-tâches. Conception d’un PCB sur mesure avec KiCad.Implémentation de contrôleurs P et PID.Lead de l’équipe électrique, en charge du firmware STM32, du design du PCB et de l’intégration matérielle. Présentation du projet Contrôleur pour pendule Inversé (en cours) Développement du firmware embarqué en C sur STM32.Implémentation d’un controleur LQR et PID.Modélisation du système et simulation avec MATLAB pour la conception du contrôleur LQR.Data logging du pendule inversé via MATLAB en utilisant un port série virtuel. Conception mécanique de la structure du pendule à l’aide de Fusion.